我國應用環境把機器人分為兩類:工業機器人和特種機器人。國際上的機器人學者,從應用環境出發將機器人也分為兩類:制造環境下的工業機器人和非制造環境下的服務與仿人型機器人。
所謂工業機器人就是面向工業領域的多關節機械手或多自由度機器人。如機械手。而特種機器人則是除工業機器人之外的、用于非制造業并服務于人類的各種先進機器人。包括服務機器人、水下機器人、微操作機器人、娛樂機器人、軍用機器人、農業機器人、機器人化機器等。
工業機器人應用
工業機器人的含義:工業機器人是能模仿人體某些器官的功能(主要是動作功能)、有獨立的控制系統、可以改變工作程序和編程的多用途自動操作裝置。
工業機器人在工業生產中能代替人做些單調、頻繁和重復的長時間作業,或是危險、惡劣環境下的作業,例如在沖壓、壓力鑄造、熱處理、焊接、涂裝、塑料制品成形、機械加工和簡單裝配等工序上,以及在原子能工業等部門中,完成對人體有害物料的搬運或工藝操作。
工業機器人的組成
組成部分關系圖
執行機構——執行機構可以抓起工件,并按規定的運動的速度、運動的軌跡把工件送到指定位置處,放下工件。通常執行機構有以下幾個部分:
1.手部。手部是工業機器用來握持工件或工具的接觸。有些工業機器人直接將工具(如電焊槍、油漆噴槍、容器等)固定在手部,它就不再另外安裝手部了。
2.腕部。腕部是將手臂連接在一起的部件。它的作用是調整手部的方位和姿態,并可擴大臂部的活動范圍。
3.臂部。臂部支承著腕部和手部,使手部活動的范圍擴大。無論是手部、腕部或是臂部都有許多軸孔,孔內有軸、軸和也之間形成一個關節,機器人有一個關節就有了一個自由度。
機械本體
1.機械本體的作用用來支承手部、腕部和臂部,驅動裝置及其他裝置也固定在機械本體上。
2.行走機構對用可以行走的工業機器人,它的機械本體是可以移動的,否則機械本體直接固定在基座上。行走機構用來移動工業機器人。有的行走機構是模仿人的雙腿,有的只不過是軌道和車輪機構而已。
3.驅動系統是裝在機械本體內,執行機構的作用是向執行元件提供動力。根據不同動力源,驅動系統的傳動方式也分為液壓式、氣動式、電動式和機械式四種。
控制系統
1. 控制系統的作用。控制系統是工業機器人的指揮中心。他控制工業機器人按規定的程序動作。控制系統還可存儲種指令(如動作順序、運動軌跡、運動速度以及動作的時間節奏等),同時還向各個執行元件發出指令。必要時,控制系統漢對自己的行為加以監視,一旦有越軌的行為,能自己排查故障發生的原因并及時發出報警信號。
2.人工智能系統。是賦予工業機器人五種感覺功能,以實現機器人對工件的自動識別和適應性操作。具有自適應性的智能化機械系統也是當前機電一體化技術的發展方向,模糊計算機的應用雖然處于這一步的初級階段,但真正具有適應性的智能化系統必將總這里突破。
檢測系統
主要用于檢測自己的執行系統所處的位置、姿勢,并將這些情況及時反饋給控制系統,控制系統根據這個反饋信息在發出調整動作的信號,使執行機構進一步動作,從而使執行系統一定的精度到達規定的位置和姿勢。
工業機器人的特點——通用性、柔軟性、自動性、準確性。
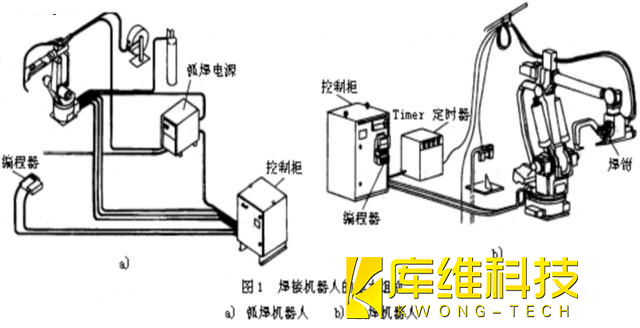
工業機器人主要種類——焊接機器人、噴漆機器人、裝配機器人、采礦機器人、搬運機器人、食品工業機器人。